ĪĪĪĪ┐╔ŠÄ│╠ą“┐žųŲŲ„Ż©║åĘQPLCŻ®╩Ūęį╬ó╠Ä└ĒŲ„×ķ╗∙ĄAŻ¼ŠC║Žėŗ╦ŃÖC╝╝ągĪóūįäė┐žųŲ║══©ą┼╝╝ągŻ¼├µŽ“┐žųŲ▀^│╠Īó├µŽ“ė├æ¶Īó▀mæ¬╣żśIŁhŠ│Īó▓┘ū„ĘĮ▒ŃĪó┐╔┐┐ąįĖ▀Ą─ą┬ę╗┤·═©ė├╣żśI┐žųŲčbų├Ż¼┼cDCSĪóIPC ▓óĘQ×ķ╣żśIūįäė╗»╣ż┐žŅIė“Ą─╚²┤¾ų¦ų∙Ż¼PLC╝╝ąg┤·▒Ēų°«öŪ░│╠ą“┐žųŲĄ─Ž╚▀M╦«ŲĮĪŻ
ĪĪĪĪļSų°╗»╣żĪóļŖ┴”Īóę▒ĮĄ╚╣żśI╔·«ačbų├ęÄ─ŻĄ─╚š┌ģ┤¾ą═╗»║═Å═ļs╗»Ż¼ŽĄĮyĄ─ĮøØ·▀\ąąęč╚š┌ģųžę¬Ż¼ŽÓæ¬ĄžŻ¼ī”īŹ╩®▀@ę╗─┐Ą─Ą─┐žųŲŽĄĮyę▓╠ß│÷┴╦Ė³Ė▀Ą─ę¬Ū¾ĪŻ ę╗ĘĮ├µŻ¼į┌ŽĄĮy│÷¼F─│ą®«É│ŻŪķørĢrŻ¼╚ń║╬īŹ¼Fį┌įS┐╔śOŽ▐Śl╝■Ž┬Ą─└^└m▀\ąąŻ¼╣╩šŽŽ¹│²║¾čĖ╦┘╗ųÅ═ĄĮš²│Ż╣żū„ĀŅæBŻ┐┴Ēę╗ĘĮ├µŻ¼╚ń║╬▒ŻūC┐žųŲŽĄĮy▒Š╔Ēį┌ę╗éĆ╗“ČÓéĆĻPµIŁh╣Ø│÷¼F╣╩šŽĄ─ŪķørŽ┬Ż¼▒▄├Ō═Ż▄ć╩┬╣╩Ż¼┤_▒ŻŽĄĮy└^└m░▓╚½┐╔┐┐Ą─▀\ąąŻ┐▀@ą®ęč│╔×ķ¼F┤·┐žųŲŽĄĮy╦∙├µ┼R║═╝▒ąĶĮŌøQĄ─ųžę¬å¢Ņ}ĪŻ
ĪĪĪĪĮŌøQ╔Ž╩÷å¢Ņ}Ą─═ŠÅĮų«ę╗Š═╩Ū▓╔ė├╚▌Õe╝╝ągĪŻ Ą½╩Ū─┐Ū░PLC į┌▀@ę╗ŅIė“āH═Ż┴¶į┌ī”╣╩šŽĄ─Öz£y┼c’@╩ŠļAČ╬Ż¼ī”▀@ŅÉå¢Ņ}Ą─蹊┐─┐Ū░ęŖųT╬─½I▓╗ČÓĪŻ į┌┤╦Ż¼▒Š╬─═©▀^ĻU╩÷└¹ė├╠▌ą╬łD▄ø╝■įOėŗüĒīŹ¼FŽĄĮyĄ─Ħ╣╩šŽ▀\ąąŻ¼ī”▀@ę╗ŅIė“Ą─╔Ž╩÷å¢Ņ}ĮoėĶ│§▓ĮĄ─╠ĮėæĪŻ
1 PLC Ą─╣╩šŽį\öÓĘĮĘ©
ĪĪĪĪį┌PLC ┐žųŲŽĄĮyųąŻ¼PLC▒Š╔ĒĄ─┐╔┐┐ąįę╗░Ń▌^Ė▀Ż¼Ą½PLC Ą─═Ō▓┐įOéõŻ¼╚ń▌ö╚ļį¬╝■Īó▌ö│÷ł╠ąąį¬╝■Īó▒╗┐žįOéõ╝░▌ö╚ļ▌ö│÷ą┼╠¢ŠĆ┬ĘĄ╚Ą─╣╩šŽ┬╩ģs║▄Ė▀ĪŻ Č°ŪęŻ¼▀@ą®įOéõę╗Ą®│÷¼F╣╩šŽŻ¼Č╝īóė░Ēæš¹éĆ┐žųŲŽĄĮyĄ─š²│Ż╣żū„ĪŻ ę“┤╦Ż¼į┌PLC│╠ą“ųąį÷╝ė╣╩šŽÖz£y│╠ą“Ż¼╝░ĢrĪó£╩┤_Ąž░l¼F╣╩šŽ▓óĖ∙ō■╣╩šŽŅÉą═Ęųäeū÷│÷ŽÓæ¬Ą─╠Ä└Ē╩ŪĘŪ│Ż▒žę¬Ą─ĪŻ
ĪĪĪĪPLC ┐žųŲŽĄĮy╣╩šŽį\öÓ╝╝ągĄ─╗∙▒ŠįŁ└Ē╩Ū└¹ė├PLC Ą─▀ē▌ŗ╗“▀\╦Ń╣”─▄Ż¼░č▀B└m½@Ą├Ą─▒╗┐ž▀^│╠Ą─Ė„ĘNĀŅæB▓╗öÓĄž┼c╦∙┤µā”Ą─└ĒŽļŻ©╗“š²┤_Ż®ĀŅæB▀Mąą▒╚▌^Ż¼░l¼F╦³éāų«ķgĄ─▓Ņ«ÉŻ¼╚╗║¾░┤╩┬Ž╚ŅAČ©Ą─ĘĮ╩Įī”įō▓Ņ«É▀Mąąūg┤aŻ¼ūŅ║¾ęį║åå╬Ą─Īó╗“▌^×ķ═Ļ╔ŲĄ─ĘĮ╩ĮĮo│÷╣╩šŽą┼Žół¾Š»ĪŻ
ĪĪĪĪ│Żė├Ą─PLC Ą─╣╩šŽį\öÓĘĮĘ©ėąŻ║▀ē▌ŗ╣╩šŽÖz£yį\öÓĘ©Īó│¼ĢrŽ▐╣╩šŽÖz£yį\öÓĘ©Īó╩ū░l╣╩šŽÖz£yį\öÓĘ©Ą╚ĪŻ
ĪĪĪĪŽ┬├µųž³cĮķĮB│¼ĢrŽ▐╣╩šŽÖz£yį\öÓĘ©ÖCąĄįOéõį┌ūįäė╣żū„裣hųąŻ¼Ė„éĆ╣ż▓ĮĄ─äėū„Č╝ę¬Ū¾į┌ę╗Č©Ą─Ģrķgā╚═Ļ│╔Ż¼│¼▀^┴╦ęÄČ©Ą─ĢrŽ▐Č°╬┤═Ļ│╔äėū„Ż¼ätęĢ×ķįOéõ▀\ąą│÷¼F╣╩šŽĪŻ ę“┤╦┐╔ęįį┌▒╗Öz£y╣ż▓Įäėū„ķ_╩╝ĢrŻ¼═¼Ģråóäėę╗éĆČ©ĢrŲ„Ż¼Č©ĢrŲ„Ą─įOČ©Ģrķg▒╚ęÄČ©äėū„ĢrķgķL25%ū¾ėęŻ¼╚ń╣¹Č©ĢrŲ„ėą▌ö│÷ätšf├„ęč░l╔·╣╩šŽŻ¼įōą┼╠¢┐╔ė├ū÷╣╩šŽ’@╩ŠĪół¾Š»║═╣╩šŽ═ŻÖCą┼╠¢ĪŻ łD1×ķę╗éĆ╣ż▓Į│¼ĢrŽ▐Ą─╣╩šŽÖz£yļŖ┬ĘĪŻ
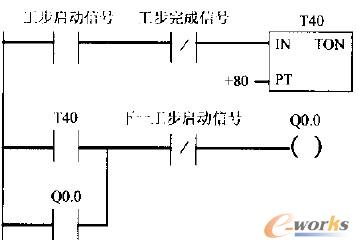
łD1╣ż▓Į│¼ĢrŽ▐╣╩šŽÖz£yļŖ┬Ę
ĪĪĪĪ╣ż▓ĮĄ─š²│Ż╣żū„Ģrķg×ķ6SŻ¼Č©ĢrŲ„T40Ą─Č©ĢrĢrķg×ķ8SŻ¼«ö╣ż▓ĮåóäėĢrŻ¼T40ķ_╩╝ėŗĢrŻ¼╚ń╣¹╣ż▓Į░┤Ģr═Ļ│╔Ż¼ät═Ļ│╔ą┼╠¢ŪąöÓT40Ą─▌ö╚ļŻ¼T40¤o▌ö│÷Č°¤o╣╩šŽą┼╠¢ĪŻ ╚¶╣ż▓Į│¼ĢrŽ▐Ż¼T40▌ö│÷╣╩šŽą┼╠¢Ż¼“īäė▌ö│÷└^ļŖŲ„Q0.0 ╩╣ų«’@╩Š║═ł¾Š»ĪŻ
ĪĪĪĪĄ½╩Ū╚ń╣¹├┐ę╗╣ż▓ĮČ╝ę¬╝ėę╗éĆČ©ĢrŲ„Ż¼«ö╣ż▓ĮČÓĪóPLC ā╚▓┐Ą─Č©ĢrŲ„▓╗ē“ė├ĢrŻ¼┐╔▓╔ė├ļAČ╬│¼Ģr╗“ī”ę╗ą®╚▌ęū│÷¼F╣╩šŽĄ─ĻPµI▓Įą“▀MąąČ©ĢrĄ─ĘĮĘ©ĪŻ
ĪĪĪĪ▀@ĘNĢrŽ▐Öz£yĘĮĘ©│²┐╔ė├ė┌╣╩šŽÖz£y═ŌŻ¼▀Ć┐╔ęįė├ū„įŁėą▒Żūo┤ļ╩®Ą─║¾éõ▒ŻūoĪŻ ╚ńė├ė┌ļŖ╠▌Ą─▀^┴„▒ŻūoļŖ┬ĘŻ¼╝┘Č©ļŖ┴„└^ļŖŲ„╩¦ņ`ät┐╔─▄¤²ē─ļŖäėÖCŻ¼╚ń╣¹╝ėįO┴╦ĢrŽ▐╣╩šŽÖz£y▓ó▓╔ė├╣╩šŽÖz£yą┼╠¢üĒ═ŻÖCŻ¼ät┐╔ŲĄĮ║¾éõ▒ŻūoĄ─ū„ė├ĪŻ─┐Ū░PLC ┐žųŲŽĄĮyĄ─╣╩šŽĄ╚╝ēĘųŅÉ╝░Ųõī”æ¬Ą─╠Ä└ĒĘĮĘ©╚ńŽ┬Ż║
ĪĪĪĪę╗╝ē╣╩šŽŻ¼┐╔─▄«a╔·ć└ųž║¾╣¹Ą─╣╩šŽĪŻ ę¬Ū¾ŽĄĮy┴ó╝┤═ŻÖCŻ¼▓óŽ“▓┘ū„╚╦åT┬Ģ╣Ōł¾Š»ĪŻ «ö╣╩šŽÖz£y▄ø╝■Öz£yĄĮę╗╝ē╣╩šŽĢrŻ¼ė╔╣╩šŽ╠Ä└Ē─ŻēKų▒Įė┐žųŲPLC ▌ö│÷Č╦┐┌Ą─ĀŅæBĪŻ
ĪĪĪĪČ■╝ē╣╩šŽŻ¼┐╔─▄ī”┐žųŲ▀^│╠«a╔·ė░ĒæŻ¼▄ø╝■¤oĘ©ūį╝mš²Ą─╣╩šŽĪŻ ┐žųŲ│╠ą“īó▐D╚ļĢ║═ŻŻ¼Ė„▌ö│÷Č╦┐┌ų├×ķ│§╩╝ĀŅæBŻ¼▓óŽ“▓┘ū„╚╦åT┬Ģ╣Ōł¾Š»Ż¼▓┘ū„╚╦åT╠Ä└Ē║¾Ż¼į┘└^└m▀\ąą│╠ą“ĪŻ
ĪĪĪĪ╚²╝ē╣╩šŽŻ¼ī”┐žųŲ▀^│╠▓╗┴ó╝┤«a╔·ė░ĒæŻ¼ė╔╣╩šŽ╠Ä└Ē│╠ą“▀Mąąūį╝mš²╠Ä└ĒŻ¼▓ó═©▀^ą┼╠¢▌ö│÷─ŻēKŲ┴▒╬Õeš`ą┼╠¢Ż¼═¼ĢrŽ“▓┘ū„╚╦åTū÷┬Ģ궳¾Š»ĪŻ ę╗Č╬Ģrķg║¾Ż¼╚ń╣╩šŽ╚į┤µį┌Ż¼ät╣╩šŽ╔²╝ēĪŻ
ĪĪĪĪ╦─╝ē╣╩šŽŻ¼│╠ą“Öz£yĄĮĄ─ę╗░ŃąįÕeš`╗“«É│ŻŻ¼ų╗ėøæø▓óŽ“▓┘ū„╚╦åTū÷│÷ŽÓæ¬Ą─ųĖ╩ŠŻ¼┐žųŲ│╠ą“└^└mł╠ąąĪŻ
ĪĪĪĪė╔┤╦┐┤│÷Ż¼─┐Ū░ī”ė┌ŽĄĮy│÷¼Fę╗╝ēĪóČ■╝ē╣╩šŽĢrĄ─╠Ä└ĒĘĮĘ©āH═Ż┴¶į┌ī”╣╩šŽĄ─Öz£y┼cł¾Š»Ą─ļAČ╬Ż¼ŽĄĮy¤oĘ©└^└m▀\ąąŻ¼ĮŌøQ╔Ž╩÷å¢Ņ}Īó▒ŻūCŽĄĮyĦ╣╩šŽ▀\ąąĄ─┤ļ╩®ų«ę╗Š═╩Ūī”╣╩šŽĮY╣¹▀MąąĘų╬÷Ż¼▓╔ė├▀m«öĄ─╚▌Õe╝╝ągĪŻ
2 ╚▌Õe╝╝ąg
ĪĪĪĪ╚▌Õe╩ŪųĖį┌ŽĄĮyųąŻ¼«öę╗éĆ╗“ČÓéĆĻPµI▓┐╝■│÷¼F╣╩šŽĢrŻ¼ŽĄĮy▓╔╚ĪŽÓæ¬┤ļ╩®Ż¼ŠS│ųŲõęÄČ©ąį─▄╗“į┌┐╔Įė╩▄Ą─ąį─▄ųĖś╦ūā╗»Ž┬Ż¼└^└mĪóĘĆČ©┐╔┐┐▀\ąąĄ──▄┴”ĪŻ
ĪĪĪĪ╚▌Õe┐žųŲŲ„Ą─įOėŗå¢Ņ}╩Ū60─Ļ┤·×ķčąųŲĖ▀ąį─▄Ą─’wÖCČ°╠ß│÷Ą─Ż¼ė╔ė┌į┌╠ßĖ▀ŽĄĮy┐╔┐┐ąįĄ╚ĘĮ├µĄ─ėąą¦ąį╩╣Ųõį┌╗»╣żĪóļŖ┴”Īóę▒ĮĄ╚╣żśI┐žųŲųąę▓Ą├ĄĮ┴╦ÅVĘ║Ą─æ¬ė├ĪŻ ╚▌Õe┐žųŲŲ„Ą─įOėŗĘĮĘ©ų„ę¬ėąė▓╝■╚▀ėÓĘĮĘ©║═ĮŌ╬÷╚▀ėÓĘĮĘ©ā╔┤¾ŅÉĪŻ ė▓╝■╚▀ėÓĘĮĘ©ų„ę¬═©▀^ī”ųžę¬▓┐╝■╝░ęč░l╔·╣╩šŽ▓┐╝■╠ß╣®éõĘ▌Ż¼ęį╠ßĖ▀ŽĄĮyĄ─╚▌Õeąį─▄Ż¼Ą½╩Ū▀@ĘNĘĮĘ©┤µį┌ų°├„’@Ą─▓╗ūŃŻ║
ĪĪĪĪ1Ż®į÷╝ė┴╦ŽĄĮyĄ─│╔▒ŠĪóĮYśŗĪóųž┴┐║═╦∙ąĶ┐šķgŻ╗
ĪĪĪĪ2Ż®į┌─│ą®ŪķørŽ┬ė▓╝■╝╝ągĄ─æ¬ė├╩▄ĄĮŽ▐ųŲŻ╗
ĪĪĪĪ3Ż®ī”┤¾ą═Å═ļsŽĄĮy╚½▓┐▓╔ė├ė▓╝■╚▀ėÓ╝╝ąg╩Ū▓╗┐╔─▄Ą─ĪŻ
ĪĪĪĪ▀@ą®▓╗ūŃ▒žīóŽ▐ųŲė▓╝■╚▀ėÓ╝╝ągĄ─æ¬ė├Ż¼ļSų°ė▓╝■ārĖ±Ą─ĮĄĄ═Ż¼╗∙ė┌ė▓╝■Ą─╚▀ėÓ╝╝ąg║═╗∙ė┌ĮŌ╬÷╚▀ėÓ╝╝ągŽÓĮY║Žīó╩Ū╚▌Õe┐žųŲĄ─░lš╣ĘĮŽ“ĪŻĮŌ╬÷╚▀ėÓ╝╝ągŻ║
ĪĪĪĪĮŌ╬÷╚▀ėÓ╚▌Õe╝╝ąg╩Ū└¹ė├┐žųŲŽĄĮy▓╗═¼▓┐╝■ų«ķgĄ─ā╚į┌┬ōŽĄ║═╣”─▄╔ŽĄ─╚▀ėÓąįŻ¼«öŽĄĮyĄ──│ą®▓┐╝■╩¦ą¦ĢrŻ¼ė├ŲõėÓ═Ļ║├▓┐╝■▓┐Ęų╔§ų┴╚½▓┐│ąō·Ų╣╩šŽ▓┐╝■╦∙å╩╩¦Ą─ū„ė├Ż¼╩╣ŽĄĮyĄ─ąį─▄ŠS│ųį┌į╩įSĄ─ĘČć·ų«ā╚ĪŻ
ĪĪĪĪ─┐Ū░ĮŌ╬÷╚▀ėÓĄ─╚▌Õe┐žųŲ┤¾ų┬Ęų×ķā╔┤¾ŅÉŻ║ųžśŗ╚▌Õe┐žųŲ║═¶ö░¶╚▌Õe┐žųŲĪŻ ė╔ė┌ŽĄĮy╣╩šŽĄ─ČÓśėąį║═ī”ŽĄĮyąį─▄Ą─Ė▀ę¬Ū¾Ż¼¶ö░¶╚▌Õe┐žųŲīŹ¼F╚▌ÕeĄ─ĘNŅÉėąŽ▐Ż¼ŠųŽ▐┴╦╦³Ą─æ¬ė├Ż¼Ž┬├µųž³cĮķĮBųžśŗ╚▌Õe┐žųŲĪŻ
ĪĪĪĪųžśŗ╚▌Õe┐žųŲ░³└©äėæB╣╩šŽį\öÓ║═┐žųŲŲ„ųžśŗā╔éĆĘĮ├µĪŻ Š▀¾wū÷Ę©╩Ū└¹ė├╣╩šŽį\öÓÖCśŗīŹĢrĄž▒O£y▓óČ©╬╗╣╩šŽŻ¼╚╗║¾Ė∙ō■ŽĄĮy╦∙╠ÄĄ─ą┬╣żū„ĀŅæBųžą┬┼õų├╣żū„³cŻ¼└¹ė├─│ĘN┐žųŲŲ„įOėŗ▓▀┬įäėæBĄžųžą┬śŗįņę╗éĆ┐žųŲŲ„Ż¼╩╣┐žųŲŽĄĮyį┌ą┬╣żū„ĀŅæBŽ┬Ż¼╚į─▄▒ŻūCę╗Č©Ą─ĘĆČ©ąį║═┐žųŲą¦╣¹ĪŻ ųžśŗ╚▌Õe┐žųŲ╩Ūį┌ŠĆ┐žųŲŻ¼ĘĮ░Ėę╗░Ńėąā╔ĘNŻ║
ĪĪĪĪ1Ż®į┌ŠĆųžśŗ———Ė∙ō■Öz£yĄĮĄ─╣╩šŽĀŅæBųžą┬įOėŗ┐žųŲŲ„╗“╣╩šŽčaāöÖCśŗĪŻ ▀@ĘNĘĮ╩Į▀m║Žė┌╣╩šŽ─Ż╩Į╩┬Ž╚▓╗┤_Č©Ż¼┐žųŲ┬╔ąĶę¬į┌ŠĆš{š¹Ą─ŪķørŻ╗
ĪĪĪĪ2Ż®ļxŠĆųžśŗ———Ė∙ō■Öz£yĄĮĄ─╣╩šŽ░č┐žųŲŲ„ŪąōQĄĮ╩┬Ž╚įOėŗ║├Ą─ŽÓæ¬Ą─╚▌Õe┐žųŲŲ„ųąŻ¼▀@ĘNĘĮ░Ė▀m║Žė┌┐╔─▄Ą─╣╩šŽ─Ż╩Į╩┬Ž╚ęčĮøų¬Ą└Ż¼┐žųŲ┬╔┐╔ęį╩┬Ž╚ļxŠĆ┤_Č©Ą─ŪķørĪŻ
ĪĪĪĪ═©▀^ęį╔ŽĘų╬÷┐╔ęį┐┤│÷Ż¼ųžśŗ╚▌Õe┐žųŲĄ─įOėŗĘĮĘ©ų╗ę¬īŹĢrČ°£╩┤_ĄžÖz£y║═Ė¶ļx│÷╣╩šŽŻ¼Š═┐╔ęį▓╔ė├╚╦éā╦∙╩ņŽżĄ─Ė„ĘNĘĮĘ©ųžśŗ┐žųŲŲ„Ż¼┐žųŲŲ„Ą─įOėŗ▓▀┬įų„ę¬ėąśO³c┼õų├ĪóūŅā×┐žųŲĪó─Ż║²┐žųŲĄ╚ĪŻ
ĪĪĪĪ▒Š╬─Ė∙ō■PLC ┐žųŲŽĄĮy╣żū„裣hĄ─╠ž³cŻ¼į┌│õĘų┐╝æ]ŽĄĮy┐╔─▄│÷¼FĄ─╣╩šŽŅÉą═Ą─╗∙ĄA╔ŽŻ¼└¹ė├╣╩šŽį\öÓ│╠ą“Ė¶ļx│÷╣╩šŽų«║¾Ż¼═©▀^ļxŠĆųžśŗĄ─įOėŗŻ¼╝┤Ė∙ō■╣╩šŽį\öÓĄ─ĮY╣¹Ż¼ŠÄīæ╠▌ą╬łD▄ø╝■┐žųŲą┬Ą─▌ö│÷³cŻ¼üĒīŹ¼F└¹ė├ą┼╠¢▌ö│÷─ŻēKŲ┴▒╬╣╩šŽ³cŻ¼╩╣ŽĄĮyĦ╣╩šŽ▀\ąąĪŻ
ĪĪĪĪĄ½╩Ū▀@ą®ĘĮĘ©ę└┘ćė┌╣╩šŽÖz£yĘųļxÖCśŗŻ¼ę╗Ą®Å─╣╩šŽ░l╔·ĄĮÖz£yĘųļxÖCśŗÖz£y│÷╣╩šŽ▀@Č╬čėĢrĢrķg▀^ķLŻ¼Š═┐╔─▄╩╣ŽĄĮyĄ─ąį─▄ūāē─ĪŻ
3 ╚▌Õe╝╝ągæ¬ė├īŹ└²
ĪĪĪĪļSų°ć°├±ĮøØ·Ą─’w╦┘░lš╣╝░╚╦éā╬’┘|╔·╗ŅąĶŪ¾Ą─╠ßĖ▀Ż¼ļŖ╠▌▓╗Ą½ęč│╔×ķĖ▀īėĮ©ų■▓╗┐╔╚▒╔┘Ą─┤╣ų▒Į╗═©▀\▌öįOéõŻ¼ę▓īó│╔×ķĄ═īėĮ©ų■ųąĄ─┤·▓Į╣żŠ▀Ż¼ę“┤╦ī”ļŖ╠▌╣╩šŽ╠Ä└ĒĄ─蹊┐╚šØuųžę¬ĪŻ ėąą®ļŖ╠▌į┌įOėŗė▓╝■ļŖ┬ĘĢrŻ¼Š═┐╝æ]ĄĮ┴╦╣╩šŽĄ─ūį╠Ä└Ē╣”─▄ĪŻ
ĪĪĪĪ▒Š╬─īóųž³c蹊┐Ė▀īėļŖ╠▌╣żū„▀^│╠ųą«öŲõ─│īėŲĮīė┐žųŲ╗ž┬Ę│÷¼F╣╩šŽĢrŻ¼└¹ė├▄ø╝■īŹ¼F╣╩šŽį\öÓ╝░╚▌Õe┐žųŲŻ¼▒ŻūCļŖ╠▌╣żū„╚╬äš═Ļ│╔Ą─ĘĮĘ©ĪŻŠ▀¾wĄ─Ż¼īóęį╦─īėĄ─ļŖ╠▌─Żą═×ķ└²Ż¼╠ĮėæįōĘĮĘ©Ą─īŹ╩®å¢Ņ}ĪŻ įōļŖ╠▌─Żą═└¹ė├▐IĹĖĮėąĄ─ė└Š├┤┼ĶF┼c┴óų∙╔ŽĄ─Ė╔╗╔╣▄Ą─╬³║ŽüĒīŹ¼FŲĮīėŻ¼įōŲĮīėą┼╠¢Įø▀^ļŖį┤ŠĆ┼cPLCĄ─▌ö╚ļČ╦ūė▀Mąą▀BĮėĪŻ ę╗Ą®ŲĮīėŠĆ┬Ę│÷¼F╣╩šŽŻ¼▐IĹŠ═Ģ■│÷¼FįĮ╬╗Ż¼▀Ć┐╔─▄│÷¼F▐IĹø_Ēö╗“ČūĄūĄ─ć└ųž║¾╣¹Ż¼Ė∙ō■╣╩šŽĄ╚╝ēĘųŅÉĘĮĘ©Ż¼┤╦Ģræ¬×ķę╗╝ē╣╩šŽŻ¼į┌Öz£y│÷╣╩šŽų«║¾Ż¼ŽĄĮyæ¬┴ó╝┤═ŻÖCĪŻ Ą½╩Ūį┌īŹļHĄ─╣╩šŽÖz£yųąŻ¼«ö╣╩šŽ▒╗ūRäe║¾Ż¼═∙═∙▐IĹ╬╗ė┌ā╔īėśŪų«ķgŻ¼╚ń╣¹▀@Ģr═ŻÖCŻ¼ä▌▒žĮo│╦┐═ĦüĒ┴╦┬ķ¤®Ż¼į┌ļŖ╠▌ŠSą▐╚╦åT╬┤ĄĮüĒų«Ū░Ż¼¤oĘ©░▓╚½ū▀│÷ļŖ╠▌ĪŻ ╗∙ė┌ęį╔ŽĘų╬÷Ż¼▒Š╬─īŹ¼F╣╩šŽį\öÓ┼c╚▌ÕeĄ─įOėŗ╦╝┬Ę╚ńŽ┬Ż║
ĪĪĪĪ3.1 ╣╩šŽÖz£y┼cĘųļx
ĪĪĪĪį┌įōŽĄĮyųąŻ¼ŲĮīėą┼╠¢ĮøļŖį┤ŠĆ┼cPLC Ą─▌ö╚ļČ╦ūėŻ©10ĪŻ4 ~10ĪŻ7Ż®ŽÓ▀BŻ¼ŽĄĮy¤o╣╩šŽ▀\ąąĢrŻ¼▐IĹ▀M╚ļśŪīėŻ¼ī”æ¬Ą─▌ö╚ļ╝─┤µŲ„ų├1Ż¼ļxķ_śŪīėĢrŻ¼ų├0Ż¼╚¶▐IĹ─▄ē“š²│Ż═Ż┐┐į┌ųĖČ©īėŻ¼ätšJ×ķįōīėŲĮīėŠĆ┬ʤo╣╩šŽĪŻ š²│ŻŪķørŽ┬▐IĹį┌īėķgĄ─▀\ąąĢrķg▓╗│¼▀^6sŻ¼Č©ĢrŲ„T40Ą─Č©ĢrĢrķg×ķ8sŻ¼═©▀^╔Ž╩÷Ęų╬÷╬ęéā┐╔ęį└¹ė├ŲĮīėą┼╠¢Ą─Ž┬ĮĄčžą┼╠¢üĒ┤_Č©▐IĹļxķ_śŪīėåóäėČ©ĢrŲ„Ż¼└¹ė├ŽÓÓÅśŪīėĄ─ŲĮīėą┼╠¢Ą─╔Ž╔²čžą┼╠¢üĒ┤_Č©▐IĹ▀M╚ļŽÓÓÅśŪīėŪąöÓČ©ĢrŲ„Ą─▌ö╚ļŻ¼╣żū„š²│ŻĢrŻ¼Č©ĢrŲ„ø]ėą▌ö│÷Ż¼Ą½╩Ū«öŽÓÓÅīėĄ─ŲĮīėą┼╠¢│÷¼F╣╩šŽĢrŻ¼▐IĹļm╚╗▀M╚ļśŪīėŻ¼ė╔ė┌Öz£y▓╗ĄĮŲĮīėą┼╠¢╔Ž╔²čžĄ─ĄĮüĒŻ¼Č©ĢrŲ„└^└mėŗĢrŻ¼ų▒ĄĮČ©ĢrŲ„Ą─▌ö│÷×ķ1Ż¼═¼Ģrę└ō■Ū░Ž“Įø▀^Ą─śŪīė┼c▀\ąąĘĮŽ“Ż¼╝┤┐╔īŹ¼F╣╩šŽśŪīėĄ─ūRäeŻ¼ų┴┤╦īŹ¼F┴╦ŽĄĮyĄ─╣╩šŽÖz£y┼cĘųļxŻ¼╚ńłD2ĪŻ
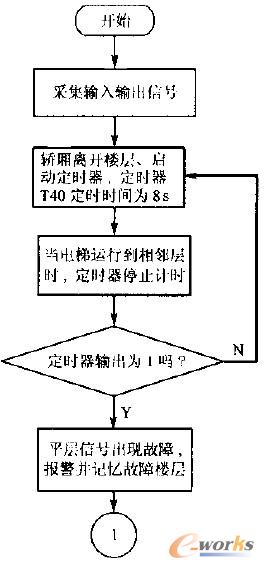
łD2 ╣╩šŽÖz£y┼cĘųļx
ĪĪĪĪ3.2 ŽĄĮy╝ė╚ļ╚▌Õe║¾Ą─┐žųŲ▓▀┬į
ĪĪĪĪ▀@ŅÉ╣╩šŽ═©│Ż×ķķgą¬╣╩šŽŻ¼╩Ūė╔ė┌Įėė|▓╗┴╝╗“Šų▓┐ėą╚▒Ž▌Ą─į¬▓┐╝■įņ│╔Ą─ĪŻ ╗∙ė┌▀@ę╗╠ž³cŻ¼Ė∙ō■PLC ┐žųŲ裣h╣żū„Ą─╠žąįŻ¼«öÖz£yĘųļx│÷▀@ą®╣╩šŽų«║¾Ż¼┐╔│õĘų└¹ė├Ųõ╦¹═Ļ║├▓┐╝■░┤šš╚ńłDĄ─▓▀┬įī”Ųõ▀MąąŲ┴▒╬Ż¼╝┤═©▀^╠▌ą╬łDųĖ┴ŅīŹ¼Fī”ŽÓÓÅśŪīėĄ─ūįäė║¶╠▌Ż¼┐žųŲ▐IĹŽ╚═Ż┐┐ĄĮ▀\ąąŪ░ĘĮĄ─ŽÓÓÅśŪīėŻ©Ąūīė┼cĒöīė│²═ŌŻ¼╚¶ĄūīėŲĮīėą┼╠¢│÷¼F╣╩šŽŻ¼┐žųŲ▐IĹ═Ż┐┐ĄĮČ■īėŻ╗Ēöīė│÷¼F╣╩šŽŻ¼┐žųŲ▐IĹ═Ż┐┐ĄĮ╚²īėŻ®Ż¼ų«║¾ŽĄĮy└^└m░┤š²│ŻŪķør▀\ąąŻ¼═¼Ģrī”ī”æ¬śŪīė│÷¼F╣╩šŽĄ─┤╬öĄĘųäe▀Mąą└█ėŗŻ¼│¼▀^ę╗Č©┤╬öĄų«║¾Ż¼šJ×ķįō╣╩šŽęč▐D×ķė└Š├╣╩šŽŻ¼╣╩šŽ╔²╝ēĪŻ
ĪĪĪĪłD3 ×ķųąķg─│śŪīėŲĮīėą┼╠¢│÷¼F╣╩šŽ║¾Ą─╚▌Õe┐žųŲ▓▀┬įĪŻ
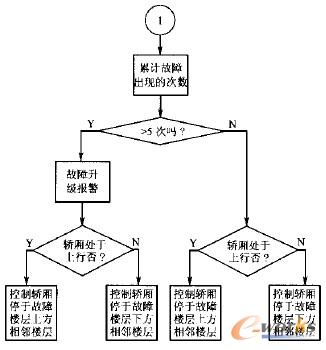
łD3 ╚▌Õe┐žųŲ▓▀┬į
ĪĪĪĪĮø▀^▀@śėĄ─įOėŗų«║¾Ż¼įōę╗╝ē╣╩šŽŠ═ęč▐D╗»×ķ╦─╝ē╣╩šŽŻ¼ų╗ąĶŽ“▓┘ū„╚╦åTū÷│÷ŽÓæ¬Ą─ųĖ╩ŠŻ¼ļŖ╠▌│²▓╗─▄īŹ¼Fī”įōīėĄ─║¶Įąų«═ŌŻ¼▓ó▓╗ė░ĒæŲõ╦³śŪīėĄ─▀\ąąĪŻ ▓óŪę▀@ĘNįOėŗĘĮĘ©═©▀^īŹĢrĄžÖz£yŲĮīėą┼╠¢Ż¼▀Ć┐╔īŹ¼Fī”╣╩šŽĄ─įńŲ┌ł¾Š»ĪŻ
ĪĪĪĪ│²┤╦ų«═ŌŻ¼┤╦ĘNĘĮĘ©▀Ć┐╔æ¬ė├ė┌ļŖ╠▌Ą─ķ_ĻPķT╣╩šŽūį╠Ä└ĒųąŻ¼╚ńėąĄ─ļŖ╠▌į┌ŲĮīė║¾▓╗─▄ķ_ķTĢrŻ¼ätūįäė╔Žąąę╗īėįćķ_ķTŻ¼╚ń─▄┤“ķ_ät╗ųÅ═š²│Ż╣żū„Ż¼╚ń▓╗─▄┤“ķ_ätį┘╔Žąąę╗īėŻ¼ų▒ų┴Ēöīė║¾į┘ę╗īėīėŽ┬ąąų┴╗∙šŠł¾Š»ĪŻ
4 ĮY╩°šZ
ĪĪĪĪ╚▌Õe╝╝ąg╩Ū╠ßĖ▀┐žųŲŽĄĮyĄ─┐╔┐┐ąįĄ─ėąą¦┤ļ╩®ų«ę╗Ż¼į┌ŽĄĮyė▓╝■įOėŗĄ─╗∙ĄA╔ŽŻ¼▒Š╬─Ė∙ō■PLC┐žųŲŽĄĮyĄ─╠ž³cŻ¼ī”▀@ę╗ŅIė“Ą─å¢Ņ}▀Mąą┴╦│§▓ĮĄ─╠ĮėæŻ¼═©▀^╠▌ą╬łD▄ø╝■Ą─įOėŗŻ¼īŹ¼F┴╦╣╩šŽĄ─Öz£y┼c╚▌Õe╠Ä└Ē╣”─▄ĪŻ PLC┐žųŲŽĄĮyĄ─╣╩šŽÖz£y│╠ą“▀Ćėą║▄ČÓŻ¼į┌▄ø╝■ķ_░lĢrŻ¼═©▀^│õĘų┐╝æ]ŽĄĮy┐╔─▄│÷¼FĄ─╣╩šŽŻ¼▓óįOėŗŽÓæ¬Ą─Ę└ĘČ│╠ą“Ż¼╩Ū▒▄├Ō║═£p╔┘▀@ą®╣╩šŽī”ŽĄĮy«a╔·ė░ĒæĄ─ųžę¬┤ļ╩®ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://m.lukmueng.com/
▒Š╬─ś╦Ņ}Ż║╗∙ė┌PLCĄ─äėæBŽĄĮy╣╩šŽį\öÓ┼cĦ╣╩šŽ▀\ąąĘĮĘ©
▒Š╬─ŠWųĘŻ║http://m.lukmueng.com/html/solutions/14019310183.html